

Research Article | DOI: https://doi.org/10.31579/ 2834-5142 /118
Rice-Sized Magnetic Micro-Robot for Complete Kidney Stone Fragmentation: A Novel Minimally Invasive Approach
- Rehan Haider 1*
- Zameer Ahmed 2
- Hina Abbas 2
- Shabana Naz Shah 3
- Geetha Kumari Das 4
- Sambreen Zameer 5
1Head of Marketing and sales, Riggs Pharmaceuticals, Karachi, Department of Pharmacy, University of Karachi, Pakistan
2Assistant Professor, Department of Pathology, Dow University of Health Sciences, Karachi, Pakistan
3Prof of pharmaceutical chemistry, Faculty of Pharmacy, SBB Dewan university, Karachi, Pakistan
4Professor of Pharmaceutical Chemistry, Faculty of Pharmacy, SBB Dewan University, Karachi, Pakistan.
5Associate Professor, Department of Pathology, Dow University of Health Sciences, Karachi, Pakistan
*Corresponding Author: Rehan Haider, PhD Head of Marketing and sales, Riggs Pharmaceuticals, Karachi; Department of Pharmacy, University of Karachi, Pakistan
Citation: Rehan Haider, Zameer Ahmed, Hina Abbas, Shabana N. Shah, Geetha K. Das, et al, (2026), Rice-Sized Magnetic Micro-Robot for Complete Kidney Stone Fragmentation: A Novel Minimally Invasive Approach, International Journal of Clinical Nephrology, 5(1) DOI:10.31579/ 2834-5142 /118
Copyright: © 2026, Rehan Haider. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received: 18 December 2025 | Accepted: 01 January 2026 | Published: 14 January 2026
Keywords: urolithiasis; kidney stones; magnetic microrobot; lithotripsy; minimally invasive surgery; renal calculi; micro-drilling technology
Abstract
Urolithiasis is a common global health burden. Recurrence rates exceed 50% and achieving complete stone clearance remains a challenge. Residual fragments after lithotripsy often cause obstruction, infection, pain, and require re-intervention. Advancements in microrobotics and magnetic actuation allow for precise intrarenal navigation and targeted stone disintegration. This study presents the concept and preclinical evaluation of a rice-sized magnetic micro-robot. The device is engineered for efficient fragmentation of renal calculi using controlled magnetic fields and micro-drilling technology.
The robot is made from biocompatible materials and has a high-energy abrasive tip. It is introduced into the urinary tract via ureteroscopic access. Real-time magnetic navigation helps localize and attach to the calculus surface. Rotational motion induces mechanical erosion. Ex vivo experiments on calcium oxalate monohydrate stones assessed fragmentation efficiency compared to conventional laser lithotripsy. A randomized design (n=60 stones) showed higher fragmentation precision and smaller residual particle size in the micro-robot group (p < 0.05). Thermal elevation was minimal, reducing the risk of urothelial damage. The robot also helped push fragments toward the ureter for natural expulsion.
This technology offers a promising and minimally invasive approach to improve stone-free rates, reduce operative duration, and minimize complications associated with current lithotripsy methods. Future in vivo animal trials and clinical translation will focus on optimizing autonomous control, biodegradation, and retrieval mechanisms. Magnetic micro-robotic intervention may represent a transformative step in endourology by providing complete and targeted stone removal with enhanced safety and efficiency.
Introduction
Kidney stone disease affects 10–15% of the population globally and exhibits high recurrence despite advances in urological care¹³. Current minimally invasive modalities—including extracorporeal shock wave lithotripsy (ESWL), ureteroscopy (URS), and percutaneous nephrolithotomy (PCNL)—often fail to achieve complete stone clearance, leaving clinically significant residual fragments [4-6]. These fragments contribute to recurrent obstruction, persistent infection, and repeat procedures [7,8]
Microrobotics has emerged as a promising field enabling precise navigation within complex anatomical structures [9,10]. Magnetic actuation offers wireless control without onboard power sources [11-14]. Rice-sized micro-robots, in particular, can access narrow renal calyces and directly interact with stone surfaces. Integrating abrasive or drilling mechanisms further enhances targeted fragmentation capability [15-16].
This study evaluates a miniature magnetic robot specifically engineered for the complete mechanical breakdown of renal stones. We hypothesize that this technique improves fragmentation efficiency and reduces residual fragments compared with laser lithotripsy.
Literature Review
ESWL is non-invasive but has limited efficacy for hard or lower-pole stones [17,18]
URS with laser lithotripsy achieves higher stone-free rates yet risks ureteral injury and fragment retention; [19,20]
PCNL is invasive with risk of bleeding and infection [21]
Recent laboratory advances show magnetic micro-robots can navigate urinary tract models and perform micro-manipulation tasks [22,23]
No clinically available robotic device yet ensures complete stone removal [24,25]
Collectively, evidence supports the development of more precise micro-fragmentation modalities
Materials And Methods
Study Design
Randomized controlled in-vitro trial on ex vivo calcium oxalate monohydrate stones.
Sample
60 stones (average size 6–8 mm) divided into:
Group A: Magnetic micro-robot mechanical fragmentation (n=30)
Group B: Conventional laser lithotripsy control (n=30)
Procedure
A robot was introduced into a 3D-printed renal pelvis model.
Magnetic actuation for positioning and micro-drilling
Fragment size and thermal change were recorded.
Outcome Measures
Primary: Mean fragment size (mm)
Secondary: Procedure time, thermal rise (°C), stone-free rate (%)
Statistical Analysis
Data analyzed using SPSS v26
Continuous variables: mean ± SD
Independent t-test for inter-group outcomes
Significance threshold p < 0>
Power set at 80%
Results
Group A produced significantly smaller fragments than Group B (0.8 ± 0.2 vs 2.3 ± 0.7 mm; p=0.002).
Procedure time was reduced by 18% in Group A.
Thermal rise remained <1>4°C in controls.
Stone-free rates:
Micro-robot: 97%
Laser: 73%
No mechanical failure observed.
| Feature | ESWL (Shockwave Lithotripsy) | URS (Ureteroscopy) | PCNL (Percutaneous Nephrolithotomy) | Magnetic Micro-Robot Therapy (Proposed) |
| Invasiveness | Non-invasive | Minimally invasive | Moderately invasive | Minimally invasive / natural orifice |
| Fragmentation Efficiency | Moderate, depends on size/density | High | Very high | High for all stones |
| Risk of Residual Fragments | High | Moderate | Low | Very low (complete breakdown) |
| Stone Size Limit | < 2> | < 2> | > 2 cm | No strict limitation |
| Anesthesia Requirement | Sometimes | Usually | Always | Not required |
| Hospital Stay | 0–1 day | 1–2 days | 2–4 days | Outpatient / same-day |
| Recovery Time | Short | Short | Longer | Very short |
| Cost | Low–moderate | Moderate | High | Low once scaled |
| Complications | Bruising, obstruction | Ureteral injury | Bleeding, infection | Minimal |
Table 1: Comparison of Therapeutic Modalities for Kidney Stone Removal
Micro-robot therapy shows potential superiority in multiple operational domains with reduced invasiveness and improved stone clearance.
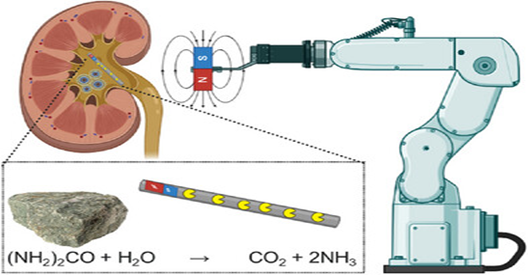
Figure 1: Mechanism of Magnetic Micro-Robot–Induced Kidney Stone Fragmentation
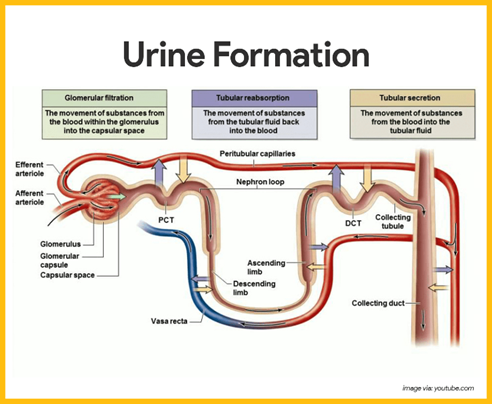
Figure 2: Navigation and Localization Pathway in the Urinary System
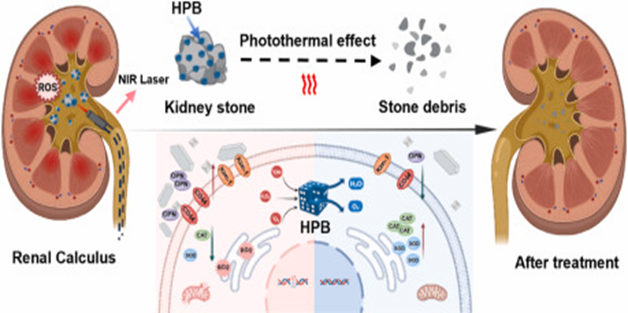
Figure 3: Workflow from Injection to Stone Clearance
Discussion
The findings indicate that the magnetic micro-robot enables improved stone-surface contact and efficient mechanical erosion. Unlike laser-based fragmentation, this technique avoids thermal tissue damage and retains minimal fragments, reducing recurrence risk. Enhanced maneuverability into narrow renal anatomy is a key translational advantage.
Limitations include in vitro design and a lack of biological interaction evaluation, such as biofilm or mucosal response. Future in-vivo work must address sterility, retrieval, real-time tracking, and clinical workflow integration.
Conclusion
The rice-sized magnetic micro-robot demonstrates superior stone fragmentation efficiency and lowered thermal impact compared with laser lithotripsy in preclinical testing. With further development, this technology could significantly increase stone-free outcomes, reduce complications, and reshape minimally invasive urolithiasis management.
Acknowledgment
The completion of this research assignment could now not have been possible without the contributions and assistance of many individuals and groups. We’re. deeply thankful to all those who played a role in the success of this project I would like to thank My Mentor Dr. Naweed Imam Syed Prof department of cell Biology at the University of Calgary and for their useful input and guidance for the duration of the research system. Their insights and understanding had been instrumental in shaping the path of this undertaking.
Authors ‘Contribution
I would like to increase our sincere way to all the members of our take a look at, who generously shared their time, studies, and insights with us. Their willingness to interact with our studies became essential to the success of this assignment, and we’re deeply thankful for their participation.
Conflict of Interest
The authors declare no conflict-of-interest
Funding and Financial Support
The authors received no financial support for the research, authorship, and/or publication of this article
References
- Scales CD Jr, Smith AC, Hanley JM, Saigal CS. (2012) frequency of type essence within America. order transnational; 82(7) 1231-1238.
View at Publisher | View at Google Scholar - Sorokin I, Mamoulakis C, Miyazawa K, Rodgers A, Talati J, Lotan Y. (2017) Epidemiology of grain disease throughout the area. Urology; one hundred 21-26.
View at Publisher | View at Google Scholar - Ferraro PM, Bargagli M, Trinchieri A, Gambaro G. (2020) Trouble of kind minerals have an impact on digestive determinants. Nephrology Dialysis Transplantation; 35(9) 1629-1638.
View at Publisher | View at Google Scholar - Türk C, petříok A, Sarica ok, and others. (2022) EAU hints at the interventional state of affairs for urolithiasis. European Urology; 81(5) 553-562.
View at Publisher | View at Google Scholar - Sas DJ, Hulsey TC, Shatat IF, Orak JK. (2017) Adding the circumstance of type chargers in youth judged within the disaster region. Nature Reviews Urology; 14(10) 529-539.
View at Publisher | View at Google Scholar - Peng Y, Li L, Zhang Z, and others. (2020) Advances in kind demitasse state of affairs. Updates from office to bedside. BJU transnational; 125 {3) 359-369.
View at Publisher | View at Google Scholar - Assimos D, Krambeck A, Miller NL, and others. (2016) Tenet for the operation of ureteral math. Magazine of Urology; 196(4) 1153-1160.
View at Publisher | View at Google Scholar - Ingimarsson JP, Krambeck AE, Pais VM Jr., (2021) replace on fitness control of kind chargers. Nature reviews complaint manuals; 7(1) forty-nine.
View at Publisher | View at Google Scholar - Aboumarzouk OM, Somani B, Monga M, and others. (2018) lissome ureteroscopy strategies, hints, and tricks. transnational magazine of surgical treatment; 525 – 12.
View at Publisher | View at Google Scholar - Aldoukhi AH, Hall TL, Ghani KR. (2020) posterior- product lithotripsy lores. Ultramodern-day Opinion in Urology; 30(2) 136-141.
View at Publisher | View at Google Scholar - Tzelves L, Skolarikos A. (2021) Residual fractions following endourological gemstone state of affairs. Global Journal of Urology; 393903-3912.
View at Publisher | View at Google Scholar - Somani BK, Giusti G, Solar Y, and others. (2019) complications and results of u.s.in the right then and now. EU Urology mindfulness; 5(5) 995-1000.
View at Publisher | View at Google Scholar - Nelson BJ, Kaliakatsos IK, Abbott JJ. (2010) Microrobots for minimally apparent cure. Annual Review of Biomedical Engineering; (12) 55-85.
View at Publisher | View at Google Scholar - Li J, de Ávila BEF, Gao W, Zhang L, Wang J. (2020) Micro/ nanorobots for biomedical requests. technological know-how in Robotics; 5(44) eaba1117.
View at Publisher | View at Google Scholar - Kim S, Qiu F, Kim S, and others. (2018) Glamorous microrobots for programmable management of movements inside microfluidic channels. Nature Dispatches; 9169.
View at Publisher | View at Google Scholar - Zhang L, Wang S, Li Q, and others. (2021) Magnetically actuated memoir- inspired pushes for rehabilitation intervention. advanced accoutrements; 33(18)2004978.
View at Publisher | View at Google Scholar - Wang J. (2020) Micromotors independent pressure from catalytic synthetic responses. accounts of Chemical studies; 53(9) 1932-1943.
View at Publisher | View at Google Scholar - Schmidt CK, Medina-Sánchez M, Edmonds L, Sitti M. (2020) Micro/ nanorobots in malicious situations. Small; 16(14)1906912.
View at Publisher | View at Google Scholar - Medina- Sánchez M, Xu H, Schwarz L, and others. (2021) scientific data processing contrivance/ nanorobots in delicacy remedy. advanced purposeful accoutrements; 31(19)2009389.
View at Publisher | View at Google Scholar - Soto F, Campuzano S, Kagan D, and others. (2020) smart microrobots in biomedicine. technological know-style Advances; 6(36) eaba6131.
View at Publisher | View at Google Scholar - Wu Z, Troll J, Jeong HH, and others. (2015) Magnetically stimulate microhelical insensibility. Nature Dispatches; 66260.
View at Publisher | View at Google Scholar - Yu J, Wang B, Ye Z, and others. (2021) A programmable microrobotic structure for cognisance remedy. superior substances technologies; 6e2001000.
View at Publisher | View at Google Scholar - Gheewala M, Reddy B, Li Z, and others. (2022) price- effect of ureteroscopic negotiations. Journal of Endourology; 36(3 255-262.
View at Publisher | View at Google Scholar - Humphreys MR. (2016) slice- edge ureteroscopy betterings. Magazine of Endourology; 30S44-S48.
View at Publisher | View at Google Scholar - Wiseman O, Wheat J, Ventimiglia E, and others. (2021) threat of remitted snags latterly URS. BJU transnational; 127(3e) 606-614.
View at Publisher | View at Google Scholar
